Настройка ПИД регуляторов по отклику (Метод №1).
1. Перевести регулятор в ручной режим, дождаться пока стабилизируется процесс и произвести однократное изменение выходного сигнала (выхода на клапан) X, которое обеспечит приемлемый отклик переменной технологического процесса Y (рисунок.1).
2. После получения отклика вернуться к исходному значению выходного параметра сигнала регулятора. Переменная технологического процесса также должна вернуться к исходному значению. Если различие значительно, повторите попытку отклика.
3. Определить коэффициент усиления процесса (Kp=Y/X), время запаздывания d, и временную константу Т усреднением значений верхнего и нижнего откликов.
4. Рассчитать коэффициенты настройки ПИД регулятора по формулам представленным в таблице 1.
5. Для более устойчивой работы регулятора возможно необходимо будет увеличить временную константу замкнутого контура (E).
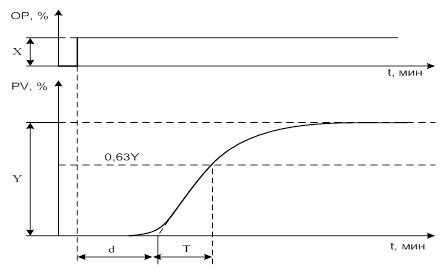
Рисунок 1. Отклик процесса на ступенчатое воздействие.
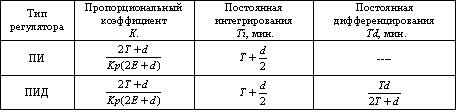
Таблица 1. Формулы вычисления коэффициентов для ПИД регуляторов
Где: Х – значение изменения выходного воздействия (в %);
Y – значение изменения переменной процесса (в % от шкалы);
Kp – коэффициент усиления процесса;
d – время запаздывания реакции процесса (в минутах);
Т – временная константа процесса (в минутах);
E – заданная временная константа замкнутого контура (минуты). Минимально возможное время в течении которого настраиваемый регулятор может привести значение переменной процесса к заданию.
Kp=Y/X
E=T+d
Для более устойчивой работы регулятора значение E нужно увеличить.
При настройке каскадных регуляторов, сначала настраивается ведомый регулятор, затем ведущий регулятор. Причем, временная константа E ведущего регулятора должна быть больше временной константы E ведомого регулятора минимум в 5 раз.
Настройка ПИД регулятора по методу максимального коэффициента усиления (Метод №2).
1. Переключите регулятор в ручной режим работы, когда процесс достаточно стабилен и на установке не ожидается резких отклонений от заданного режима. Установите Td (постоянную дифференцирования регулятора) и K (пропорциональный коэффициент регулятора) в значение равное нулю, а Ti (постоянную интегрирования регулятора) на максимальное значение.
2. Запомните исходное положение клапана на тот случай, если вам потребуется вернуться к нему в процессе настройки. Переключите регулятор в автоматический режим.
3. Постепенно увеличивайте значение пропорционального коэффициента до тех пор, пока не начнутся колебания. Нужно добиться, чтобы колебания были с постоянной амплитудой. Если колебания будут с возрастающей амплитудой, то пропорциональный коэффициент нужно уменьшить. При сильной раскачке необходимо перевести регулятор в ручной режим, выставить запомненное ране в пункте 2 значение выхода на клапан, уменьшить пропорциональный коэффициент и повторить попытку. Когда получатся равномерные колебания, замерьте период колебания tc (время отработки одного полного цикла)(см. рисунок 2). Получившийся пропорциональный коэффициент будет максимальным для данной системы регулирования (Kmax).
4. По полученным tc и Kmax, рассчитать коэффициенты настройки ПИД регулятора по формулам представленным в таблице 2.
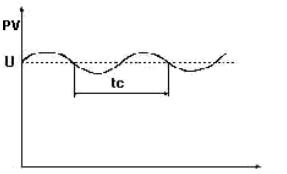
Рисунок 2. Определение периода колебаний
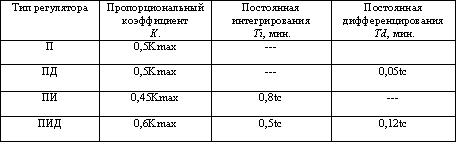
Таблица 2.Формулы вычисления коэффициентов для ПИД регуляторов
Общие правила для настройки регуляторов:
Регулятор не будет нормально работать, если клапан почти полностью закрыт или почти полностью открыт.
Настраивать регулятор нужно в той зоне шкалы, предположительно в которой ему предстоит работать.
Не следует использовать воздействие дифференциальной составляющей для регуляторов расхода.
Не следует использовать малые значения интегральной составляющей в регуляторах уровня.
Не следует использовать воздействие дифференциальной составляющей в регуляторах уровня.
После настройки регулятора, необходимо проверить его устойчивость, сменив значение задания на значительную величину. Если будет наблюдаться раскачка, то необходимо уменьшит коэффициент усиления.
Следует помнить о том, что безопасными для устойчивости регулятора, являются большие значения Ti и малые значения Td.
При зашумленных результатах измерений использование дифференциальной составляющей, как правило, невозможно. Ни в коем случае не устанавливайте дифференциальную составляющую, которая превышает интегральную.
При настройке каскадных регуляторов время интегрирования ведущего регулятора должно быть в 4 раза больше чем время интегрирования ведомого регулятора.
Примечание: После настройки регулятора по методу 1 или методу 2, для более точной работы регулятора можно подстроить его коэффициенты опираясь на рисунок 3.
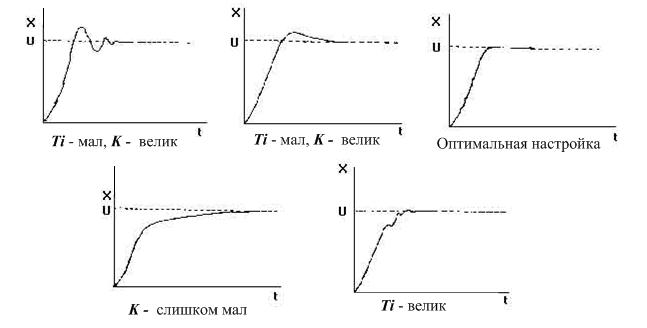
Рисунок 3. Графики для уточнения настройки регулятора.
С дополнительными материалами по настройке ПИД регуляторов Вы можете ознакомиться здесь.
Узнать больше про регуляторы и алгоритмы работы регуляторов Вы можете здесь.
Для закрепления полученных знаний предлагаем Вам воспользоваться программой имитации контуров регулирования Перейти