Вторичные пневматические приборы предназначены для контроля и записи различных технологических параметров, величины которых преобразованы в стандартный диапазон измерения пневматического сигнала.
Питание приборов осуществляется сжатым очищенным и осушенным воздухом давлением 1,4 ± 0,14 кгс/см2.
Самопишущие пневматические приборы снабжены электрическим (последняя буква в обозначении модификации прибора — Э) или пневматическим (то же, буква П) приводом диаграммной ленты.
Основные характеристики вторичных пневматических приборов.
| Тип прибора | Дополнительные устройства | Количество контролируемых параметров | Осн. погр, % | Способ контроля | ||||||
| Показ. | Самоп. | |||||||||
| Станция управл. | Блок сигнал. | Задатчик | 1 | 2 | 3 | 4, 6, 8, 16 | ||||
| ПВ3.2 | + | + | + | 1 | + | |||||
| ПВ2.2 | + | + | 1 | + | ||||||
| ПВ4.4Э | + | 1 | + | |||||||
| ПВ10.1Э | + | + | + | 1 | + | |||||
| ПВ10.2Э | + | + | + | 1 | + | |||||
| ПВ4.2Э | + | 1 | + | |||||||
| ПВ4.3Э | + | 1 | + | |||||||
| ППВ1.1 | + | 1 | + | |||||||
| ПКР-1 | + | 0,5 | + | + | ||||||
| 1 | ||||||||||
| ПКР-2 | + | 0,5 | + | + | ||||||
| 1 | ||||||||||
| ПК1.3 | + | 0,5 | + | + | ||||||
| 1 | ||||||||||
| ПВ1.3 | + | 0,5 | + | + | ||||||
| РПВ4.2Э | + | 1 | + | |||||||
| РПВ4.3Э | + | 1 | + | |||||||
В приборах типа ПВ (рис.1) измеряемое давление Рвх от первичного преобразователя поступает на приемный элемент — сильфон 5. Сжатый воздух от источника питания через постоянный дроссель 3 поступает в линию, соединяющую сопло 7 с силовым элементом 11. При измерении Рвх сильфон перемещает рычаг 4, что вызывает изменение зазора между соплом 7 и заслонкой 8, находящейся на конце рычага 4. Это приводит к изменению давления в линии сопла, а следовательно, в силовом элементе 11. При этом перемещаются сферическая упругая мембрана силового элемента и упирающийся в нее рычаг 10. Последний посредством лавсановой нити 2 и пружины обратной связи с рычагом 4. Пружина 9 растягивается и создает усилие, действующее обратно усилию, образованному на силовом элементе 11.
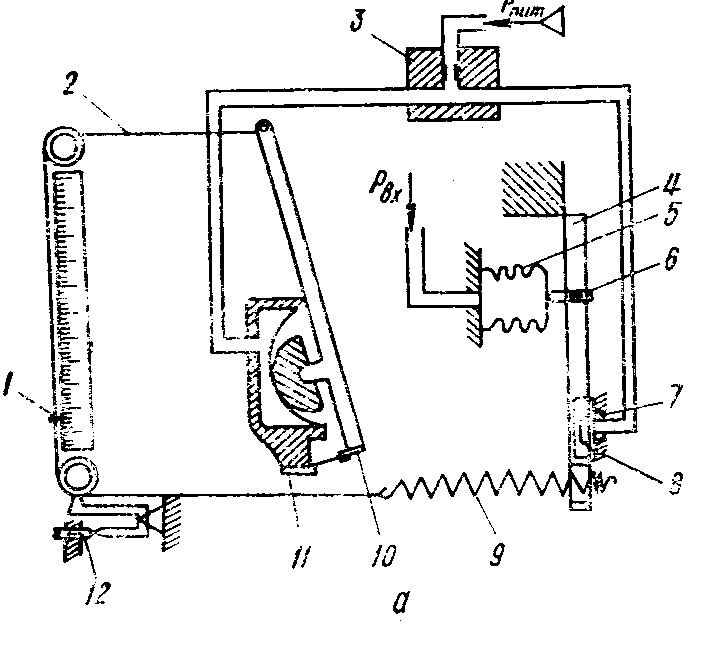
Рисунок 1
Таким образом, усилие, созданное Рвх на приемном сильфоне 5, уравновешивается усилием в линии обратной связи. Перемещение рычага 10 силового элемента передается указателю1 и перу. Начальное положение стрелки при Рвх = (0,2 кгс, см2) устанавливается вращение винта 12 корректора нуля под шкалой (изменением положения направляющего ролика). Корректировка диапазона измерения прибора при Рвх= (1 кгс,см2) осуществляется изменением числа рабочих витков пружины обратной связи (осторожным вращением фиксатора — скобы). Грубая настройка нуля осуществляется винтом на приемном сильфоне.
Приборы типов ПВ3.2, ПВ10, применяемые в схемах автоматического регулирования, помимо измерительных устройств имеют станцию управления, состоящую из ручного задатчика ЗД и переключателя П (рис. 2). Узел задатчика VI предназначен для установки задания (контрольной точки) при автоматическом регулировании и изменения положения клапана исполнительного механизма при ручном управлении.
Переключатель П состоит из пяти кнопок и предназначен для плавного перевода систем автоматизации технологических процессов в различные режимы, ручного управления с помощью задатчика прибора, непосредственно подключенного к исполнительному механизму, автоматического регулирования, при котором исполнительным механизмом управляет регулятор, автоматического программного регулирования, при котором задание регулятору поступает от специального прибора программного задатчика.
Кнопками «Р» , «А», «АП», выбирают соответственно ручной, автоматический и автоматический программный режимы управления, кнопками «Откл.» И «Вкл.» Управляют включением регулятора (работает в режимах «А» и «АП», в остальных режимах должен быть отключен).
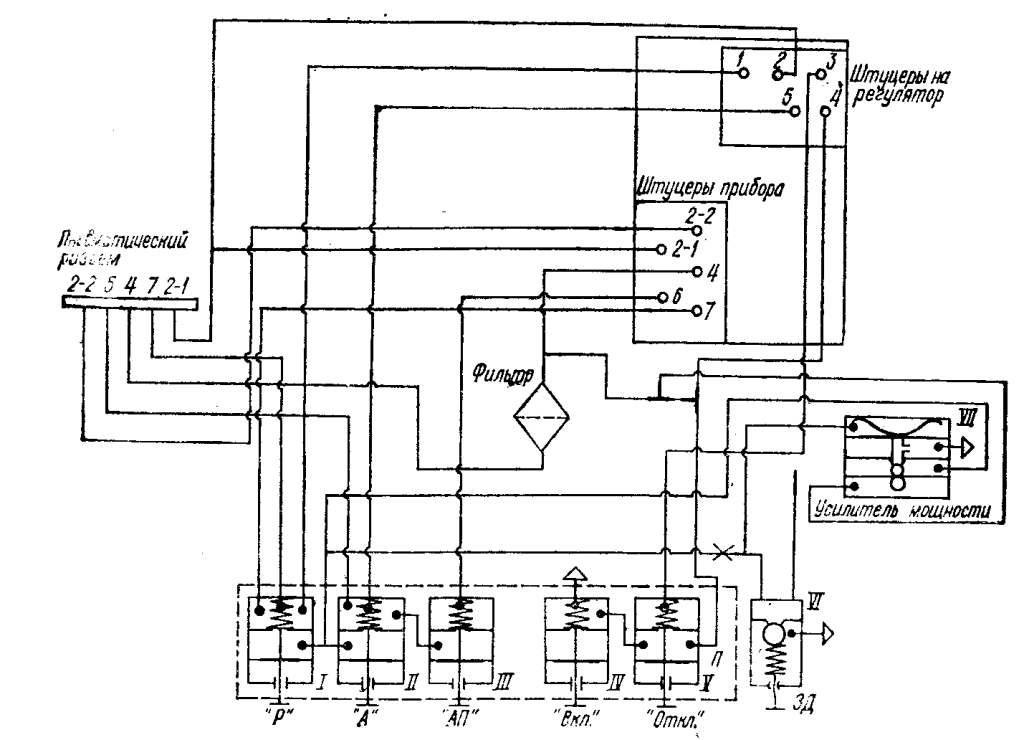
Рисунок 2
При ведении технологического процесса переход из одного режима управления в другой осуществляется переключением кнопок станции в следующей последовательности:
- ручное управление — нажимают кнопки «Р» и «Откл», при этом отключаются клапаны I и II, сигнал от задатчика VI через усилитель VII и клапан I переходит к штуцерам 7 пневматического разъема и прибора, к штуцеру 1 на регулятор и шкалу клапана исполнительного механизма, регулируемая переменная подводится к штуцеру 2-1 прибора и к штуцеру 2 на регулятор;
- промежуточное положение при переходе с ручного управления на автоматическое регулирование — нажимают кнопку «А», клапан I закрывается и отключает задатчик от исполнительного механизма, через клапан II давления от задатчика через штуцер разъема 5 поступает на шкалу задания прибора и в регулятор, при отключенном регуляторе (кнопка «Откл» нажата) устанавливают задание равным переменной;
- автоматическое регулирование — нажимают кнопку «Вкл» при этом выключающее реле регулятора (штуцер 3) через клапан IV соединяется с атмосферой, выход регулятора (штуцер 1) с исполнительным механизмом (штуцер 7) и его шкалой на приборе, задание от ручного задатчика поступает на регулятор и шкалу задания прибора;
- промежуточное положение при переходе с автоматического на автоматическое программное регулирование — нажимают кнопку «Откл» (кнопка «А» включена), в выключающее реле (штуцер 3) поступает питание из клапана V на шкалу «Задание» и в регулятор идет сигнал от задатчика VI. Затем нажимают кнопку «АП» и, когда давление программного задатчика VI в момент его отключения, включают регулятор кнопкой «Вкл»;
- автоматическое программное регулирование — нажимают кнопки «АП» и «Вкл», сигнал от программного задатчика через клапан III поступает в регулятор и на шкалу прибора, ручной задатчик отключается от регулятора и шкалы прибора (клапан II закрыт), регулятор управляет исполнительным механизмом по программе;
- промежуточное положение при переходе с автоматического программного на автоматическое регулирование — нажимают кнопку «Откл», затем кнопку «А» и ручным задатчиком устанавливают давление, равное давлению на программном задатчике в момент его отключения, затем нажимают кнопку «Вкл»;
- промежуточное положение при переходе с автоматического в ручной режим управления — нажимают кнопку «Откл», кнопку «А» выключают, по шкале «Задание» ручным задатчиком устанавливают давление, равное давлению на шкале клапана исполнительного механизма, после чего нажимают кнопку «Р» и переходят на ручное управление.
Приборы ПВ2.2 (рис.3) снабжены блоком сигнализации выхода параметра из рабочего диапазона. Предельные значения рабочего диапазона устанавливают с помощью двух сигнальных указателей, расположенных на шкале прибора. Измерительная схема прибора ПВ2.2. Когда указатель переменной находится внутри рабочего диапазона между стрелками 4 и 5 сопел 1 и 2, С21 и С211 закрыты, сигнал на выход не поступает (Р вых = 0). При повышении параметром значение верхней границы рабочего диапазона зазор между соплом и заслонкой увеличивается, камера А11 сообщается с атмосферой, через открытое сопло С211 на выход реле проходит сигнал 1, приводящий в действие какоелибо сигнальное устройство (Рсиг(1-1)=1). Как только параметр достигнет значение нижней границы рабочего диапазона, сопла С11 и С2 закроются, камера А1 сообщится с атмосферой и через открытое сопло С21 на выходе снова появится сигнал 1 (Рсиг(1-2)=1)..
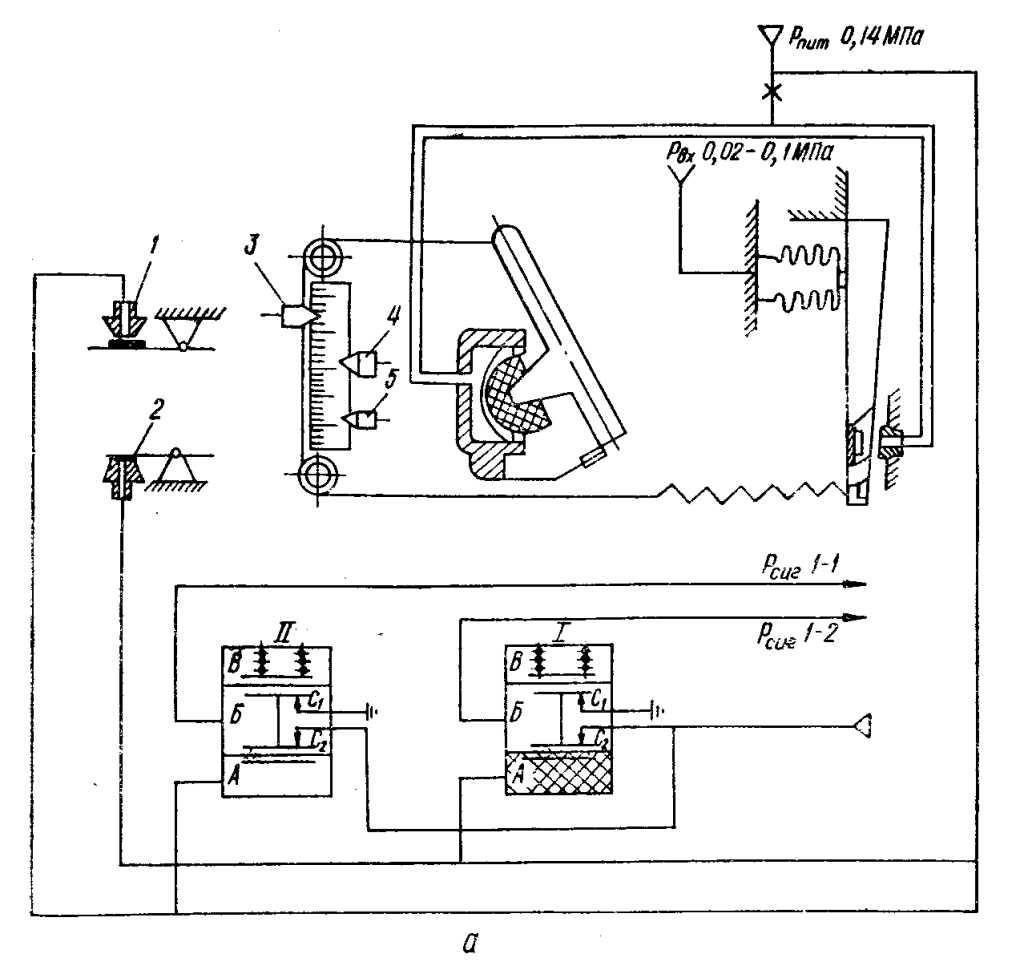
Рисунок 3
Принципиальная схема прибора типа РПВ с одним механизмом приведена на рис. 4. Входной сигнал в виде сжатого воздуха поступает в сильфон 3. Усилие, развиваемое сильфоном 3, передается на рычаг 1, который, поворачиваясь вокруг упругой опоры 2, перекрывает шариковое сопло 6 пропорционально величине входного сигнала. Изменение входного сигнала вызывает изменение зазора между соплом 6 и рычагом 1, что приводит к изменению давления в линии сопла, а следовательно, и в полости цилиндра 4 пневматического сервомеханизма. Изменение давления в цилиндре 4 вызывает перемещение поршня 10, уплотненного манжетной мембраной 9. Поступательное движение поршня10 с помощью ленточной передачи преобразуется во вращательное движение выходного вала 8, на котором жестко закреплен шкив 11, приводящий в движение посредством тросика каретку с пером и стрелкой. Поршень 10 сервомеханизма будет перемещаться, поворачивая выходной вал 8, тем самым
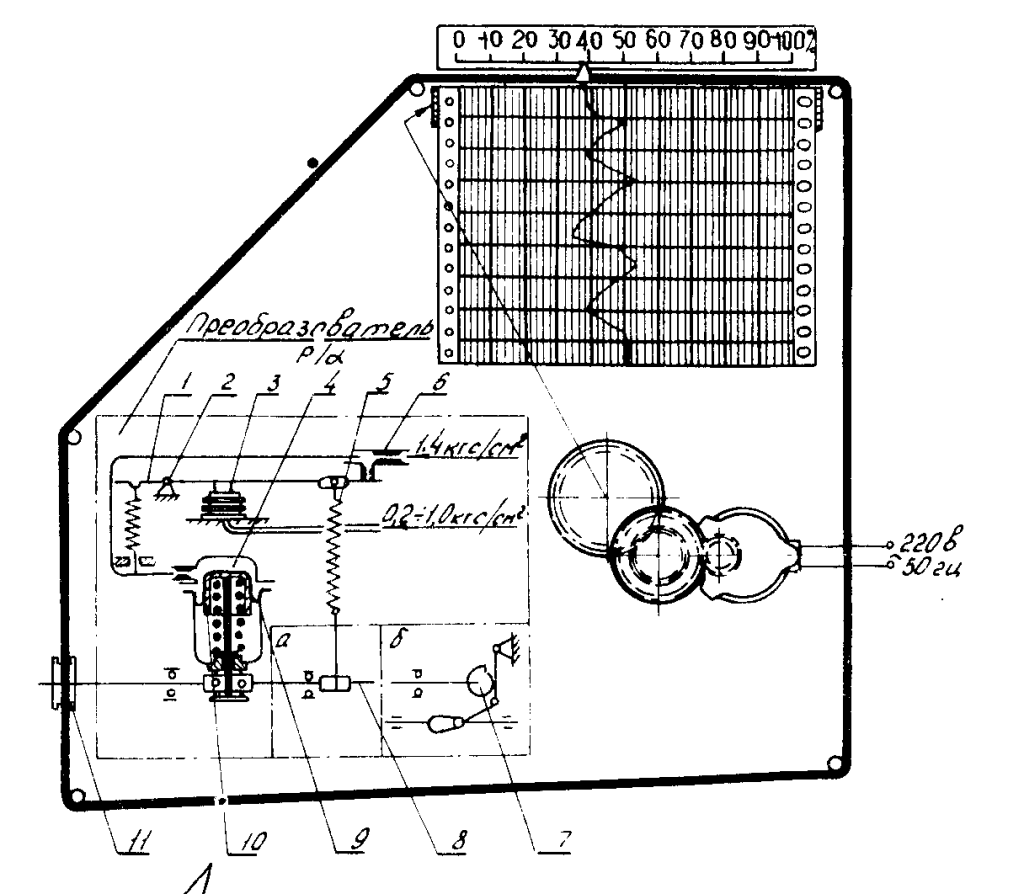
Рисунок 4
меняя натяжение пружины обратной связи 5 до тех пор, пока создаваемый натяжением пружины момент не уравновесит момент, созданный сильфоном 3. Новому состоянию равновесия соответствует новое положение стрелки прибора.
В приборах модификации «КП» и «КЭ» при изменении входного сигнала, поступающего в измерительный механизм, выходной вал 8 поворачивается на угол пропорциональный корню квадратному из величины этого изменения.
Извлечение корня квадратного осуществляется профильным кулачком 7, выполненным по параболическому закону и воздействующим на пружину обратной связи 5.